 Germany
Germany Italy
Italy USA
USA South Korea
South Korea UK
UK India
India France
France China
China Japan
JapanRobots
VERICUT simulates 6-axis articulated-arm robot motion from leading robot machine builders including Fanuc, KUKA, ABB, Kawasaki, Motorman and others. VERICUT also supports robots that have additional “external” axes. For example, robots mounted on a linear axis (or a part on a rotisserie axis) can significantly improve robot usefulness, reach, stiffness, speed, and accuracy.
In addition to simulation, VERICUT can also be used to adjust motion and post-process for robots. VERICUT computes joint positions from the incoming tool point commands and orientation, and then post-processes for the specific robot-language program. Most robots are programmed by “teaching.” Off-line programming is preferred when there are many motions, precise positions are needed, or the process must be controlled or traceable.
Typical tasks for off-line programming include:
- Cutting or trimming
- Drilling and fastening
- Fiber-placement
KUKA robot – Polishing tool
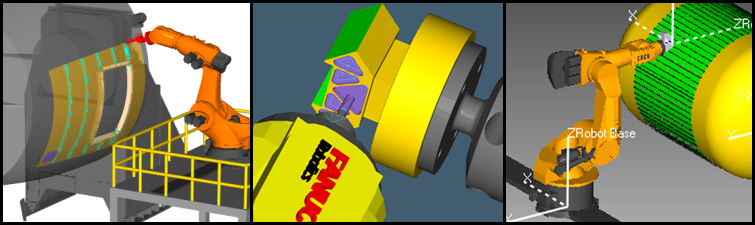
Fanuc robot – milling
Fanuc robot – part change
KUKA robot – VERICUT drilling and fastening (VDAF)
KUKA robot – VERICUT Composite Simulation
Kawasaki robot – VERICUT Composite Simulation (VCS)
KUKA robot – VERICUT Composite Simulation (VCS)
Staubi robot CNC simulation with VERICUT
KUKA robot – basic milling