 Germany
Germany Italy
Italy USA
USA South Korea
South Korea UK
UK India
India France
France China
China Japan
JapanICAM V25 - Latest Release
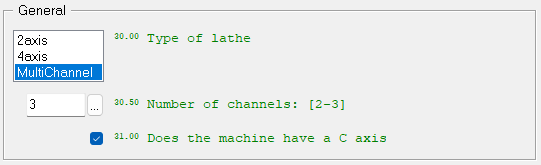
CAM-POST 3-Channel Mill-Turn Support
Previously, CAM-POST support for dual channels processing was done by using the XYZ axes to define linear axes for the main channel and the UVW axes for the side channel. Changes have been made to allow the number of channels to be extensible. The following enhancements have been introduced to support the third channel:
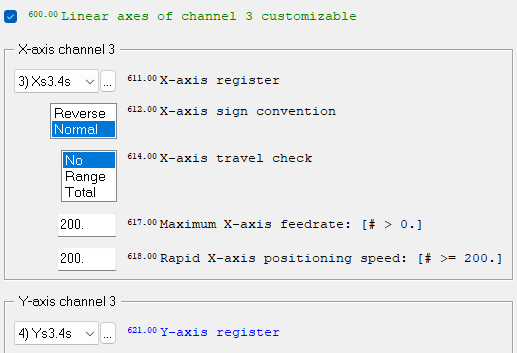
New registers for linear axes controlled by channel 2 and channel 3 can be specified easily in the Linear axes section.
The post-processor vocabulary has also been enhanced to control processing for each channel. The "CHANNEL" and "SYNCTR" commands have been added to identify intended channel numbers, to specify where simultaneous processing commands must start and end and to indicate the locations of synchronization points inside the program.
Adaptive Optimization Enhancement
The SmartPATH and SmartCUT optimization features are designed to work together. SmartCUT designates which cutting motions can be converted to positioning. SmartPATH then replaces unsafe or inefficient positioning motions with safe and more efficient moves.
Depending on the case, original air feed sometimes needs to be kept intact. To achieve this, a new SMARTP command (SMARTP/AIRCUT,AP) was made available.
Tool Path Singularity Avoidance Improvement
CAM-POST provides features that handle situations when the tool axis is parallel to the rotary pivot axis (orientation referred to as a “singular” rotary axis orientation). The LIMIT/POLAR command can be used to generate overtravel-free toolpaths. Singular optimization can be applied on a motion-by-motion basis (reactive method) or for the entire path (proactive method).
Previously, while the reactive method was available for both cutting and positioning motions (including cycles), the proactive method was limited to cutting sequences.
As of V25, singular optimization can be applied proactively to a series of CYCLE points. For adaptive posts, positioning tool motions between any two holes are still exposed to SmartPATH optimization.
For even better control, a new ROTABL/SINGLR command allows users to specify the preferred orientation of a rotary during singular positioning. GENER will use this preferred singular position, unless the motion is constrained by Path Planning or by polar optimization.
New CL-Oriented Look-Ahead
GENER provides very thorough information describing the post-processing status at any given time. This information can be collected by different “look-ahead” techniques. Functions such as $FLOOK or $FINFO are very powerful, but they perform a full-scale process, which may include optimization and simulation. This sometimes results in lengthy pauses in the post-processing completion progress.
A new $FCLINFO macro function provides the ability to quickly scan the CL file in order to retrieve key information describing the organization of the manufacturing process (tools, operation types, etc.).
Motion Optimization Fine-Tuning
CAM-POST motion optimization provides users the confidence that all motions generated by the post will be collision-free and within the machine travel envelope. This is referred to as Adaptive Post-processing. If VM simulation is also available, the feedback loop between GENER and VM allows the optimization process to take decisions in order to avoid motions that would create an interference on the machine. Regardless of the motion source, whether generated by the CAM system or added by the post-processor, the motion must be often “decorated” with special functions such as LCS, RTCP, etc.
A new macro function $FOPPATH and macro variable $OPPATHI allow the post-processor to efficiently retrieve individual motions generated by Path Planning, RTA and SmartPATH, simplifying this motion “decoration” for customizing the NC output.
Virtual Machine Enhancements
-
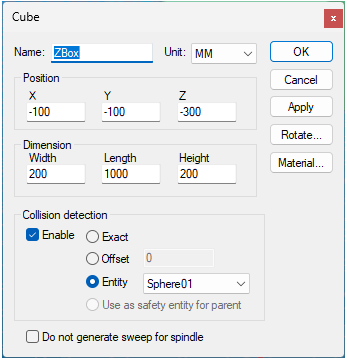
When building a VM model, the component property dialog now provides a way to import existing meshes to use as collision entity. This allows for specific shapes to be used for catching collision during simulation. The new property dialog includes three extra options for collision detection: exact, offset and entity.
- VERICUT and GibbsCAM
Support for 3DConnexion devices have been improved to support the latest models and motions will now be much smoother than before.
Added support for tool names and corresponding macro function to reference them. In addition to the tool ID, it is now possible to define a tool name in the Virtual Machine tool dialog. While the tool ID must be unique in a simulation, the tool name does not have to be. Tool names can be queried using the following macro functions: $FMSID, $FMSTOOL and $FMSIDN.

- It is now possible to define a setup name in addition to the setup ID. While the setup ID must be unique, the setup name does not have to be.
The default setup is now user-defined. Default setups are automatically applied at the start of the simulation without the need for a LOAD command or any user interaction. It is also possible to not have a default setup.
GibbsCAM Integration
A new CAM integration module is now available for CAM-POST to interface with GibbsCAM v2024 and higher. The CAM setup utility allows the selection of the ICAM database and the post-processor to be integrated. Once the utility is executed, an ICAM plugin becomes available in the GibbsCAM user interface, allowing programmers to easily generate an ICAM CL file and automatically launch GENER.
Other Enhancements:
- A new license commuting feature allows users to borrow a V25 license from the server and use it offline for a limited amount of time.
- New online web documentation. This documentation includes manuals, context help, guides and other topics in a single platform. Users can choose to access the help either locally or on the web.